Active control and passively stable patterns
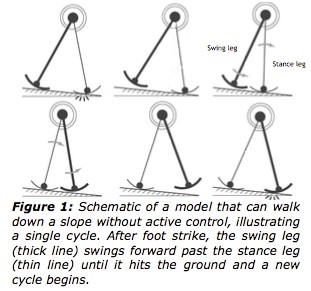
How do humans walk without falling? Stable gait requires control of the body’s center of mass in relation to its base of support. The goal is to limit, or recover, from small perturbations that occur during every step. Passive walkers may have some stability, but in real-life conditions active muscle control is paramount. Different muscles controlled by different parts of the central nervous system work to adapt the position of the base of support or to de-/accelerate the body center of mass.
Building on research on kinematic measures and neural correlates of gait stability, we hypothesize that several distinct phases of the gait cycle require active control.
PROJECT Parameters
Launch Date: Dec, 2017
Duration: 4 Years
Funding: NWO – Vidi
To test this we will
- validate and progress phase-dependent mathematical measures of gait stability, and use these to establish phase-dependency of gait control.
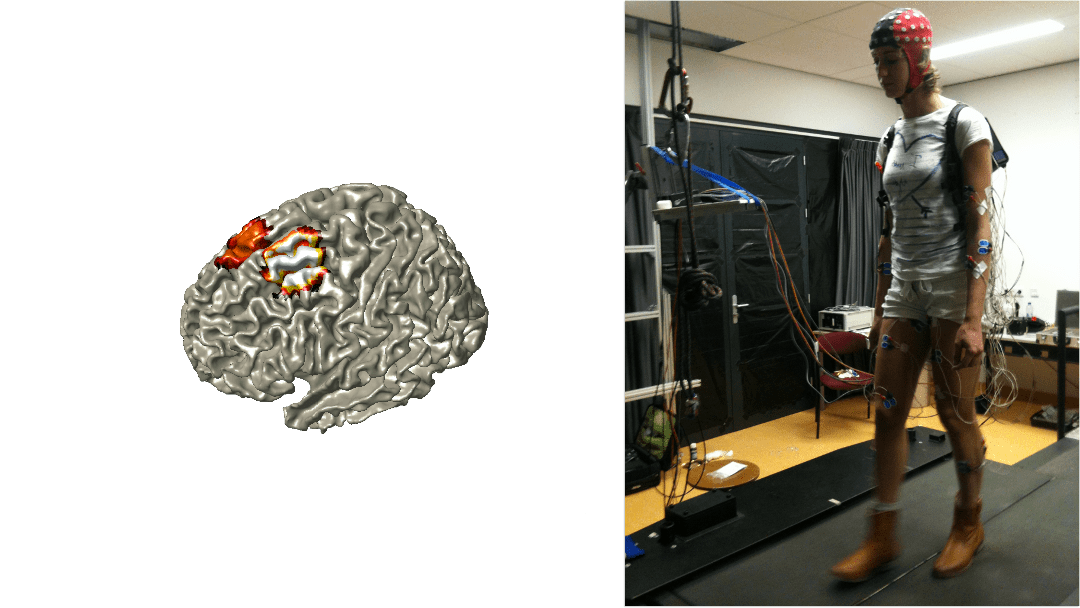
- identify movement strategies and their neural implementation used for gait stability via kinematic, electromyographic, and electro-encephalographic recordings;
- detail cortical contributions in control of gait stability using transcranial magnetic stimulation.
Related Research Themes & Projects

Stability of Gait
Walking on two legs is inherently unstable. Still, we humans perform remarkable well at it, mostly without falling. We measure and perturbed walking to gain more insight into the role of the central nervous system in controlling gait stability.
Related Publications
Stabilization of bimanual coordination due to active interhemispheric inhibition: a dynamical account.
Daffertshofer, A., Peper, C. E. & Beek, P. J. 2005 In : Biological Cybernetics. 92, p. 101-9
PDF (185 KB) | Google Scholar