
Locomotion
We study the mechanics and energetics of walking and running, with a focus on stability, i.e., our ability not to fall during these tasks. We study what sensory information and motor strategies are used and how these are affected by injury, ageing and disease, but also by training.
Intersectional Research Projects
Stability of Gait
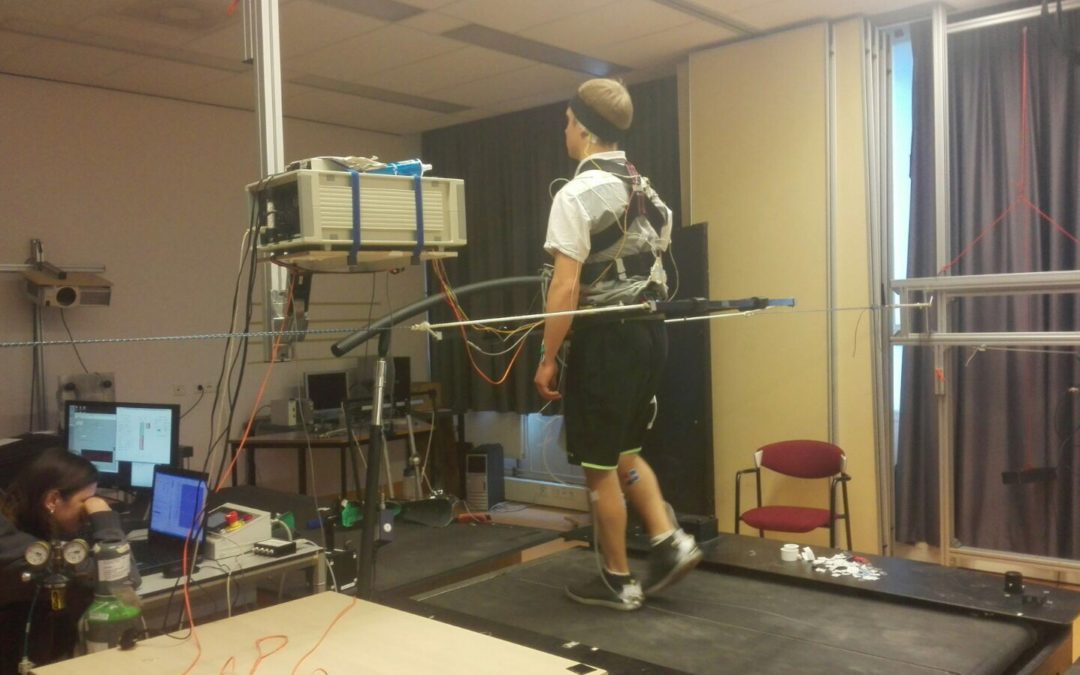
Walking on two legs is inherently unstable. Still, we humans perform remarkable well at it, mostly without falling. We measure and perturbed walking to gain more insight into the role of the central nervous system in controlling gait stability.
Active control and passively stable patterns
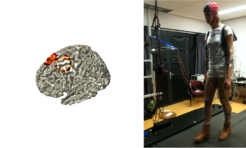
Building on research on kinematic measures and neural correlates of gait stability, we hypothesize that several distinct phases of the gait cycle require active control.
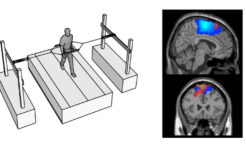
Sensory information for control of gait stability
In this project we study how the brain can estimate the kinematics of the body center of mass during walking from sensory information to control foot placement in order to maintain gait stability.

Energetics of Locomotion
Humans usually walk in a way that is energetically optimal. However, small changes to the gait pattern, such as alterations in arm swing, step length, or step width, change the metabolic energy required for walking. In this project we investigate how these small changes affect energetic cost of locomotion, and whether we can use these changes to understand how much energy is used for propulsion and maintaining stability.